




ニュース
表彰
2025年11月29日
お知らせ
2025年09月24日
お知らせ
2025年07月22日
お知らせ
2025年04月14日
研究室紹介

計測電機制御研究室では、独自の手法により開発した、材料の電気的特性を評価するための計測システム開発や、ベアリング無しに磁気浮上して回転する新しいモーターの開発を通して、計測システムの構築技術や電機機器制御の最先端技術を学ぶ。
田中康寛教授
三宅弘晃教授
土方規実雄講師
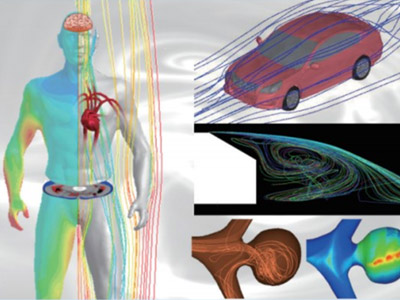
熱流体システム研究室では、独自に開発した熱流体計測手法を用いて流速・温度・濃度分布などを計測したり、伝熱を流体理論に基づいてシミュレーションによる解析を行うことにより、適切な熱流体設計を行う手法を学ぶ。
島野健仁郎教授
永野秀明准教授
白鳥英准教授

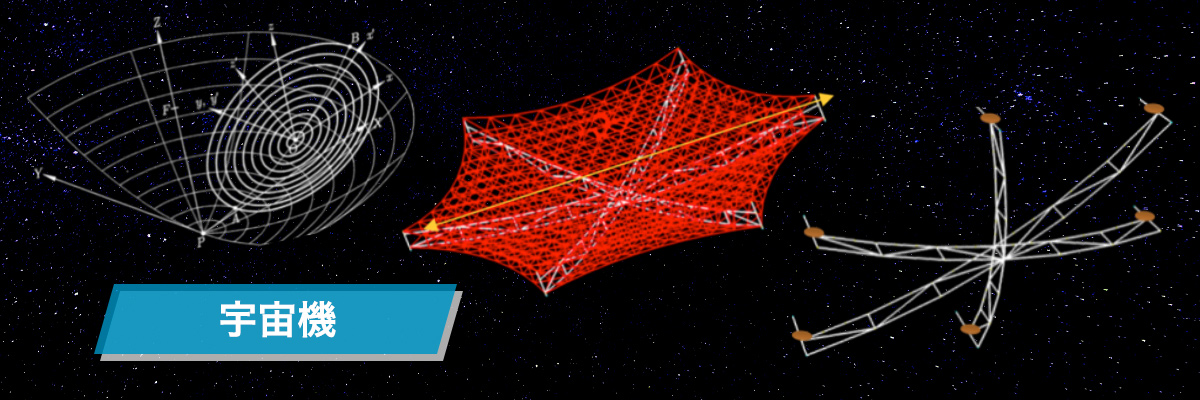
宇宙システム研究室では、大型宇宙構造や衛星システム、新たな推進システムや宇宙環境で使用する機器の開発を通して、宇宙環境に適した機械システムの応用手法を学ぶ。
宮坂明宏教授
渡邉力夫准教授

強度設計システム研究室では、材料の強度を、独自に開発した最先端技術を用いて計測し、計測結果を理論的に解析し、解析結果に基づいて強度設計を行う手法を学ぶ。
秋田貢一教授
熊谷正芳教授
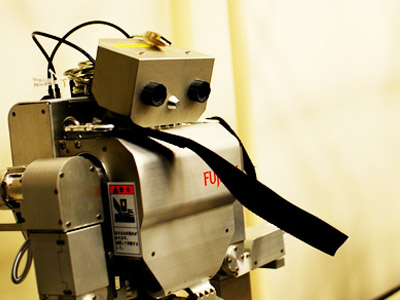
ロボティクス・メカトロニクス研究室では、実世界に働きかける機能を持つ知能化システムであるロボットの運動制御の研究を通して、実際の環境に適した機械システムの応用手法を学ぶ。
佐藤大祐准教授
藪井将太准教授
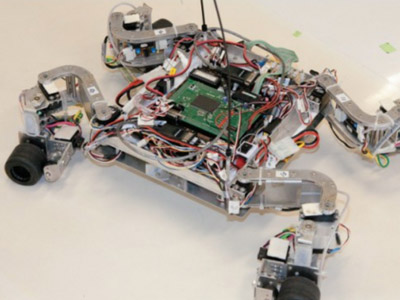
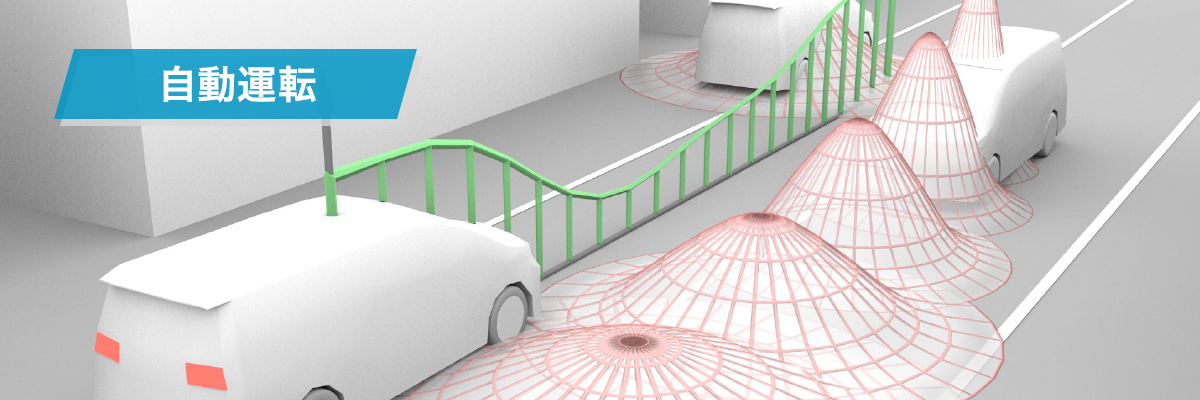
自動車の衝突防止や車線追従,航空機のオートパイロット,宇宙機の誘導制御など,今日のテクノロジーは制御工学によって大きく発展しました.本研究室では,移動ロボットを対象として,未来の動きを予測することで,周囲の障害物回避,雪道など滑りやすい路面での車輪の横滑りの抑制,さらには車両の自動運転といった最先端の制御工学を研究しています.また,制御性能を高めるためには,ハードウェアをよく理解してソフトと有機的に結合させることも重要です.このために,あらゆる方向に移動可能な四輪独立操舵駆動ロボット・脚の先に車輪を備えた脚車輪型移動ロボットや,それらの回路基板なども研究室で設計・開発し,アルゴリズムの検証と改善に役立てています.このように本研究室では,ソフトとハードの両面から制御技術の限界にチャレンジしています.
野中謙一郎教授
関口和真准教授
宇宙システム研究室では、大型宇宙構造や衛星システム、新たな推進システムや宇宙環境で使用する機器の開発を通して、宇宙環境に適した機械システムの応用手法を学ぶ。
宮坂明宏教授
渡邉力夫准教授
強度設計システム研究室では、材料の強度を、独自に開発した最先端技術を用いて計測し、計測結果を理論的に解析し、解析結果に基づいて強度設計を行う手法を学ぶ。
秋田貢一教授
熊谷正芳教授
熱流体システム研究室では、独自に開発した熱流体計測手法を用いて流速・温度・濃度分布などを計測したり、伝熱を流体理論に基づいてシミュレーションによる解析を行うことにより、適切な熱流体設計を行う手法を学ぶ。
島野健仁郎教授
永野秀明准教授
白鳥英准教授
計測電機制御研究室では、独自の手法により開発した、材料の電気的特性を評価するための計測システム開発や、ベアリング無しに磁気浮上して回転する新しいモーターの開発を通して、計測システムの構築技術や電機機器制御の最先端技術を学ぶ。
田中康寛教授
三宅弘晃教授
土方規実雄講師
自動車の衝突防止や車線追従,航空機のオートパイロット,宇宙機の誘導制御など,今日のテクノロジーは制御工学によって大きく発展しました.本研究室では,移動ロボットを対象として,未来の動きを予測することで,周囲の障害物回避,雪道など滑りやすい路面での車輪の横滑りの抑制,さらには車両の自動運転といった最先端の制御工学を研究しています.また,制御性能を高めるためには,ハードウェアをよく理解してソフトと有機的に結合させることも重要です.このために,あらゆる方向に移動可能な四輪独立操舵駆動ロボット・脚の先に車輪を備えた脚車輪型移動ロボットや,それらの回路基板なども研究室で設計・開発し,アルゴリズムの検証と改善に役立てています.このように本研究室では,ソフトとハードの両面から制御技術の限界にチャレンジしています.
野中謙一郎教授
関口和真准教授
ロボティクス・メカトロニクス研究室では、実世界に働きかける機能を持つ知能化システムであるロボットの運動制御の研究を通して、実際の環境に適した機械システムの応用手法を学ぶ。
佐藤大祐准教授
藪井将太准教授