| 高機能機械制御研究室 10号館4階 <研究室Webサイト> | ||||
| 野中 謙一郎 NONAKA Kenichiro |
教授 | 10号館4階 | knonaka[a]tcu.ac.jp | 研究業績 |
| 関口 和真 SEKIGUCHI Kazuma |
准教授 | 10号館4階 | ksekiguc[a]tcu.ac.jp | 研究業績 |
主な研究テーマ
高機能機械制御研究室では,移動ロボットを対象として,未来の動きを予測することで,周囲の障害物回避,雪道など滑りやすい路面での車輪の横滑りの抑制,さらには車両の自動運転といった最先端の制御工学を研究しています.また,制御性能を高めるためには,ハードウェアをよく理解してソフトと有機的に結合させることも重要です.このために,あらゆる方向に移動可能な四輪独立操舵駆動ロボット・脚の先に車輪を備えた脚車輪型移動ロボットや,それらの回路基板なども研究室で設計・開発し,アルゴリズムの検証と改善に役立てています.このように本研究室では,ソフトとハードの両面から制御技術の限界にチャレンジしています.
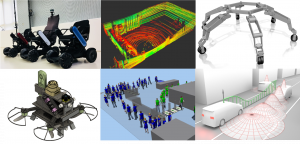
- 電動車いすの障害物回避誘導制御
- LiDAR/光学センサによる位置推定
- 脚車輪型ロボットのモデル予測制御
- モデル予測制御による高度自動運転
- ドローンの自律飛行システム開発
- ドローン群の自律分散制御
- 機械学習に基づく制御系のロバスト化
- 人の群衆流動の効率化