国際会議発表
2019 IEEE/SICE International Symposium on System Integration
機械専攻高機能機械制御研究室の修士1年菊池 智哉君が1/14-16日にフランス,パリ,ソルボンヌ大学で開催された国際学会2019 IEEE/SICE International Symposium on System Integration (SII2019)にて研究成果の英語発表を行いました.
ビジョンセンサを利用する際にはオクルージョンと呼ばれる測定値の欠落と誤認識が問題となっています.高い精度での推定を実現するためには,オクルージョンと誤認識に対してロバストな推定手法と対応付け手法が必要となります.そこで,菊池君らは最適化計算と測定された全ての測定値を用いることでオクルージョンと誤認識対してロバストな対応付け手法を提案しました.
この手法により高い精度での推定を実現し,実環境下でビジョンセンサの利用拡大が期待できます.
29th International Symposium on Transport Phenomena (ISTP29)
機械システム工学専攻熱流体システム研究室の修士2年吉井達矢君が, 10/30-11/2にHawaii Convention Centerにて開催された国際学会 29th International Symposium on Transport Phenomena (ISTP29) で研究成果を発表しました.


SICE ANNUAL CONFERENCE 2018
機械システム工学専攻, 機械専攻 高機能機械制御研究室の修士2年1名(成勢昌隆),修士1年2名(水島嘉秀,中原祥太郎)が9/11-14に奈良春日野国際フォーラムにて開催された国際学会 SICE ANNUAL CONFERENCE 2018で研究成果を口頭発表しました.




12TH IFAC SYMPOSIUM ON ROBOT CONTROL
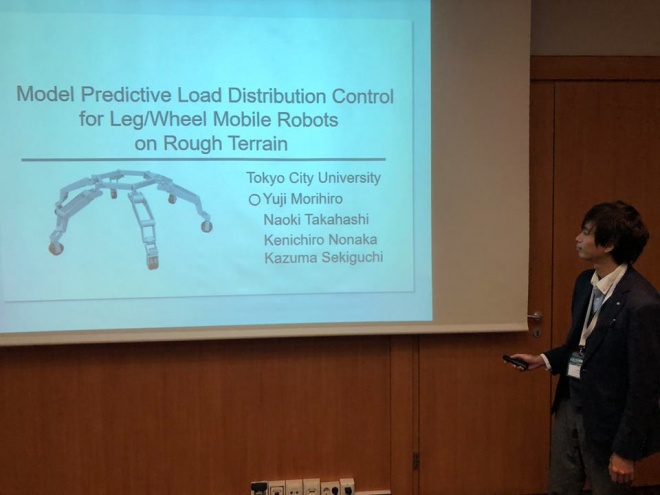
機械システム工学専攻高機能機械制御研究室の森廣 祐士君がハンガリー,ブダペストで8/27から30に開催された国際学会 12TH IFAC SYMPOSIUM ON ROBOT CONTROL にて研究成果の英語発表を行いました.
脚車輪型移動ロボットは不整地の踏破と高速・高効率の移動が期待できますが,冗長かつ非線形なシステムであるため,複雑なコントローラーが要求されます.
そこで森廣君らは、脚車輪型移動ロボットの脚に加わる荷重を定式化し,モデル予測制御を用いて不整地上における荷重配分を考慮した,脚配置制御を提案しました.
これにより、複雑な地形上において脚車輪型移動ロボットの高い移動性能が期待できます.

6th IFAC Conference on Nonlinear Model Predictive Control
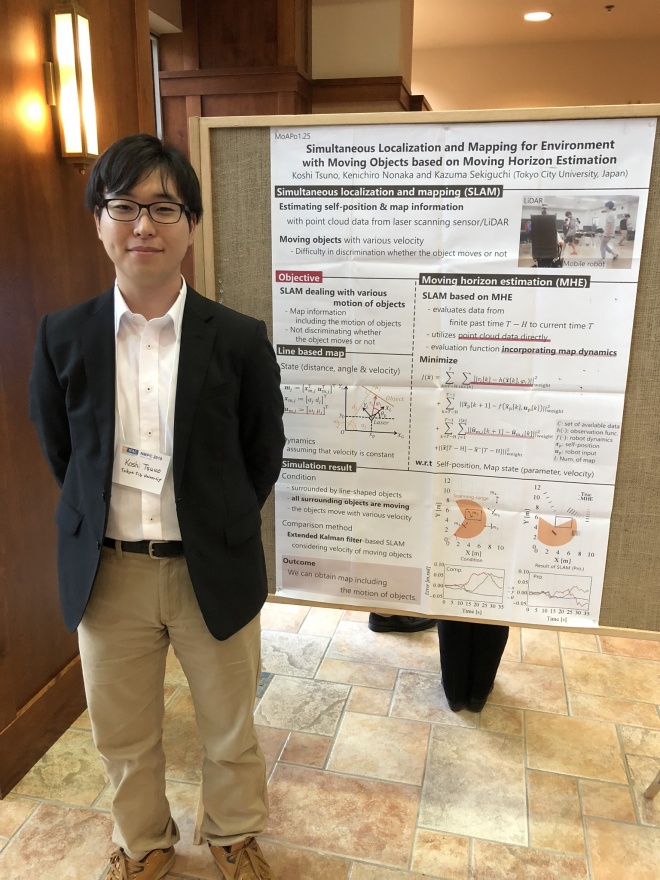
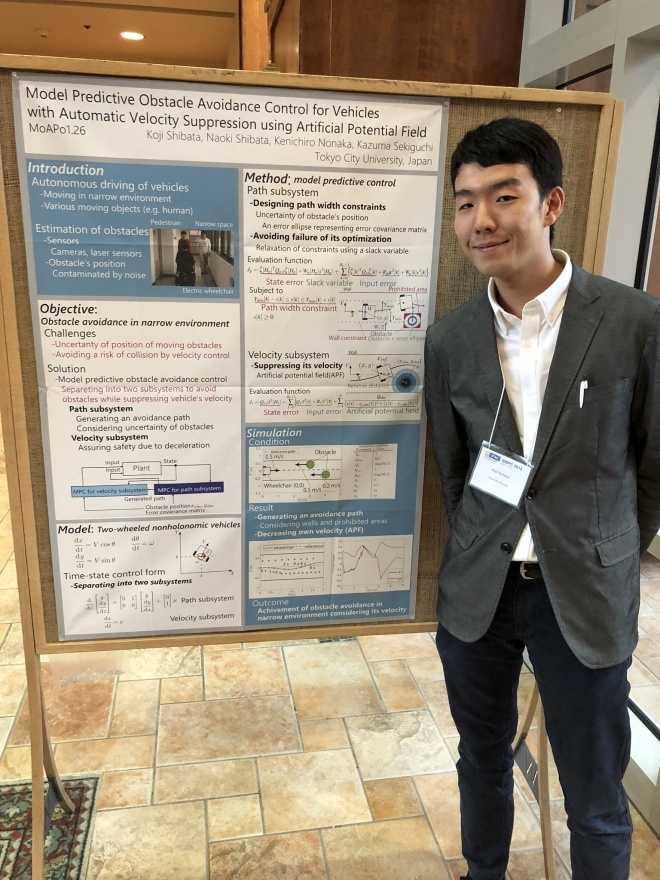
機械システム工学専攻, 機械専攻 高機能機械制御研究室の修士2年2名(柴田尚輝,津野晃士),修士1年(柴田浩志)が8/19-22にアメリカ合衆国ウィスコンシン州マディソン,ウィスコンシン大学で開催された国際学会 6th IFAC Conference on Nonlinear Model Predictive Control(http://www.nmpc2018.org/)で研究成果をポスターで発表しました.

LoopTransport2018
機械システム工学科熱流体システム研究室の4年生 安岡育子さんが、2018年7月23-24日に UCLA (University of California, Los Angeles) にて開催されたハイパーループに関する国際学会LoopTransport2018で研究成果を発表しました。


THERMEC’2018
機械システム工学専攻、機械専攻の強度設計システム研究室所属修士2年2名(石田喬一君、小山晃弘君)、修士1年1名(藤田雅紀君)が7月8日~13日にパリ@フランスで開催された鉄鋼関連分野で世界最大の国際会議THERMEC’2018 : International Conference on PROCESSING & MANUFACTURING OF ADVANCED MATERIALS, Processing, Fabrication, Properties, Applicationsにて微細粒ステンレス鋼や磁歪合金に関する研究成果を発表しました。
論文題目は以下の通りです。
石田喬一:Analyses of texture and deformation mechanism in fine-grained austenitic stainless steels by electron back scatter diffraction
小山晃弘:Prediction of magnetostrictive properties of Fe-Ga alloy based on internal energy model with magnetomechanical effect
藤田雅紀:Apparent Poisson’s ratio for Fe-Ga alloy single crystal due to magnetostriction

Japanese Modelica Conference 2018
機械システム工学専攻の柴田 尚輝君が Japanese Modelica Conference 2018にて研究成果の英語発表を行いました。
月の表面はレゴリスと呼ばれる細かい堆積物に覆われているため、車輪の沈み込みによる軟らかな地面の抵抗を考慮することは惑星探査ロボットの制御において重要です。そこで柴田君らは、軟弱地盤の振る舞いを表す数式モデルをシミュレータに導入することで、月面環境を再現できるシミュレータを構築しました。これにより、提案した制御手法をより現実的なシチュエーションで検証することが可能になります。

表彰・受賞
日本鉄鋼協会第176回秋季講演大会
2018年9月20日に東北大学で開催された日本鉄鋼協会第176回秋季講演大会学生ポスターセッション(全講演数120件)にて,強度設計システム研究室修士1年生の藤田雅紀君と松尾卓君がそれぞれ努力賞表彰を受けました.受賞講演題目は藤田君が「Fe-Ga磁歪合金の二次元磁歪分布の定量化」、松尾君が「微細粒オーステナイト鋼の変形・変態集合組織解析(加工誘起マルテンサイト変態に及ぼす初期集合組織の影響)」です。
尚,藤田君の研究の一部と松尾君の研究は本学ナノテクノロジー研究推進センターの設備を利用した成果です。
日本鉄鋼協会第177回春季講演大会
2019年3月21日に東京電機大学で開催された日本鉄鋼協会第177回春季講演大会学生ポスターセッション(全講演数68件)にて,強度設計システム研究室修士1年生の藤田雅紀君が努力賞表彰を受けました.受賞講演題目は「Fe-Ga合金単結晶の非ジュール磁歪特性の評価」です。
学科紹介トップページへ